
旋转矩阵是数学中用于描述在三维空间中物体旋转的数学工具,它能够通过特定的变换将一个坐标系中的点或向量映射到另一个坐标系中。旋转矩阵大全则是一个包含各种不同类型和角度的旋转矩阵的集合,它可以帮助人们理解和应用空间变换的奥秘。通过旋转矩阵,可以实现对物体的旋转、平移、缩放等操作,从而在计算机图形学、机器人学、物理学等领域中发挥重要作用。掌握旋转矩阵的原理和应用,可以让我们更加深入地理解空间变换的规律,为解决实际问题提供有力的数学支持。
在数学与物理学的广阔领域中,旋转矩阵作为描述物体在三维空间中旋转变换的强大工具,扮演着举足轻重的角色,它不仅在计算机图形学、机器人学、航空航天工程等实际应用中不可或缺,也是理解基本物理现象如刚体运动学、量子力学等理论的基础,本文将深入探讨旋转矩阵的各个方面,从其定义、性质、类型到具体应用,旨在为读者构建一个全面的“旋转矩阵大全”。
一、旋转矩阵的基础概念
定义与性质:旋转矩阵是描述三维空间中坐标系相对于原点进行旋转的数学工具,它是一个3x3的方阵,其元素为实数,一个基本的旋转矩阵可以表示为:
\[ R = \begin{bmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \end{bmatrix} \]
$r_{ij}$(i, j = 1, 2, 3)表示第i行第j列的元素,旋转矩阵具有以下性质:
正交性:$R^TR = R^T = I$,I$是单位矩阵,意味着旋转不改变向量的长度或角度。
行列式为1:$det(R) = 1$,保证旋转是定向的,不引起镜像反转。
二、旋转矩阵的类型与构造
绕单一轴的旋转:最基础的旋转是绕x轴、y轴或z轴的旋转。
绕Z轴的旋转(欧拉角中的偏航角):
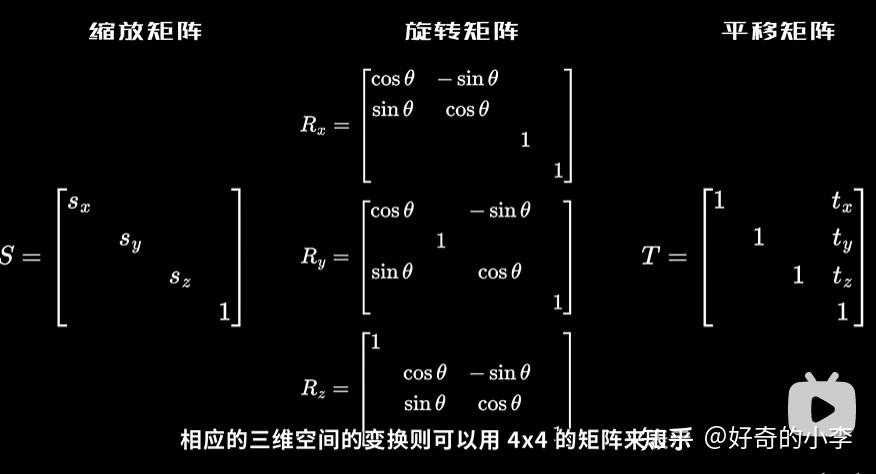
\[ R_z(\theta) = \begin{bmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1 \end{bmatrix} \]
$\theta$为绕Z轴旋转的角度。
绕X轴的旋转(俯仰角):
\[ R_x(\theta) = \begin{bmatrix} 1 & 0 & 0 \\ 0 & \cos\theta & -\sin\theta \\ 0 & \sin\theta & \cos\theta \end{bmatrix} \]
绕Y轴的旋转(滚转角):
\[ R_y(\theta) = \begin{bmatrix} \cos\theta & 0 & \sin\theta \\ 0 & 1 & 0 \\ -\sin\theta & 0 & \cos\theta \end{bmatrix} \]
绕任意轴的旋转:除了基本的单轴旋转外,还可以实现绕任意轴的旋转,这通常通过连续绕两个或三个轴的组合来实现,如通过罗德里格斯公式或四元数方法。
三、旋转矩阵的应用实例
计算机图形学:在3D建模和动画中,旋转矩阵用于计算物体在不同视角下的位置和方向,是实现真实感图形渲染的关键技术之一。
机器人学:在机器人手臂的运动规划中,旋转矩阵用于描述末端执行器相对于基座的位置和姿态,是实现精确运动控制的基础。
物理学与工程:在研究刚体动力学时,旋转矩阵用于描述物体的定向变化,对于理解卫星姿态调整、陀螺仪工作原理等至关重要,在机械设计中,利用旋转矩阵可以分析零件间的相对运动和受力情况。
四、旋转矩阵的进阶应用:四元数与罗德里格斯公式
虽然直接使用旋转矩阵可以解决许多问题,但在某些情况下(尤其是涉及连续旋转或插值时),四元数和罗德里格斯公式提供了更有效和直观的解决方案。
四元数:四元数是一种扩展了复数的概念,可以表示为$q = w + xi + yj + zk$,其中w为实部,x、y、z为虚部,四元数可以简洁地表示和执行三维空间中的旋转操作,避免了万向锁问题(即当绕单一轴连续旋转接近90度时可能出现的奇异情况)。
罗德里格斯公式:该公式提供了一种从旋转轴和角度直接计算旋转矩阵的方法,形式为:
\[ R = e^{[\vec{\omega} \times] \theta} \]
$\vec{\omega}$是旋转轴方向的单位向量,$\theta$是旋转角度,[$\vec{\omega} \times$]是反对称矩阵形式,罗德里格斯公式在数值计算中尤其有用,因为它避免了直接计算三角函数和正交化过程。
旋转矩阵作为描述三维空间中物体运动的基本工具,其重要性不言而喻,从基础的单轴旋转到复杂的任意轴旋转,从计算机图形到物理模拟,它的应用无处不在,随着技术的进步和数学工具的发展,如四元数和罗德里格斯公式的引入,使得处理复杂空间变换变得更加高效和精确,随着人工智能、虚拟现实等领域的进一步发展,对高效、精确的空间变换算法的需求将更加迫切,这也将推动旋转矩阵及其相关理论研究的深入发展,掌握好这一工具箱中的“钥匙”,将有助于我们在探索未知的科学领域时更加游刃有余。

 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号